Les ballasts électroniques, les éclairages LED modernes, les ampoules à économie d'énergie ou les blocs d'alimentation sont généralement caractérisés par des courants de démarrage élevés pouvant atteindre jusqu'à 250 fois le courant nominal. ComatReleco propose des relais spéciaux pour les courants de démarrage élevés :
- CHI14 / CHI34 : commutation au passage par zéro, jusqu'à 800 A de courant d'appel pour 800 µs
- C7-W10 : avec contact de pré-enclenchement en tungstène, jusqu'à 500 A de courant d'appel pour 2,5 ms
- C10-A15 : avec contact en argent-oxyde d'étain, jusqu'à 120 A de courant d'appel pour 20 ms
- CIM14 : relais temporisé avec commutation au passage par zéro, jusqu'à 800 A de courant de démarrage pour 800 µs
Le montage en série d'une résistance et d'un condensateur permet, lors de la coupure, au courant de s'éteindre en une oscillation amortie. Lors de la mise sous tension, la résistance empêche la charge complète du condensateur de se décharger via le contact de commutation. Le circuit de protection à l'aide d'un circuit RC est très bien adapté à la tension alternative. De plus, il permet une limitation immédiate de la coupure.
Pour une commande fiable d’un circuit d’escalier LED, il est possible d’utiliser le CHI34/UC24-240V avec le CIM1/UC24-240V. Le CIM1 assure la logique de pas. Le CHI34 est conçu pour les systèmes LED modernes et garantit une commutation stable de l’éclairage.
Tension de bobine ?
- Vous trouverez les tensions de bobine AC et DC disponibles dans le catalogue. Le support technique de ComatReleco peut vous aider si vous ne trouvez pas la tension de bobine adaptée à votre application.
Charge à commuter ?
- Type de charge ?
- La charge à commuter est-elle ohmique ? Inductive ? Capacitive ? Il s'agit d'un facteur très important à connaître pour choisir un relais/contacteur.
- CA ? CC ?
- La charge à commuter est-elle alimentée en courant alternatif ou en courant continu ? Quelle est la tension ?
Fréquence de commutation ?
- À quelle fréquence le relais doit-il être commuté par jour, heure, minute ou même seconde ? En cas de cycles de commutation nombreux, il est recommandé d'utiliser un relais à semi-conducteurs, car il n'y a pas de contact mécanique et sa durée de vie est donc pratiquement illimitée.
Environnement ?
- Cela comprend, par exemple, la température ambiante à laquelle le relais/contacteur est installé. Il faut également fournir des informations sur l'environnement : est-il poussiéreux ? Y a-t-il des infiltrations d'humidité ? Des gaz agressifs ? D'autres facteurs notables ?
Commutation de petits signaux, à quoi faut-il faire attention ?
- Si les signaux à commuter sont de l'ordre du mA, il est important de choisir un relais adapté avec une charge minimale correspondante. Les relais avec contacts plaqués or sont adaptés à cet effet. L'or a une très bonne conductivité, ce qui permet de commuter de petits signaux. Cependant, l'or a tendance à souder les contacts lorsque les courants sont trop élevés. ComatReleco propose également des relais avec contacts doublement plaqués or. Ces contacts doubles garantissent une sécurité de commutation accrue pour les circuits de commande et de signalisation.
- Une autre alternative aux relais mécaniques est l'utilisation de relais à semi-conducteurs. La série CSS de ComatReleco permet de commuter de manière fiable des courants à partir de 1 mA (CC) et 35 mA (CA).
Les diodes de roue libre servent à protéger contre les surtensions lors de la coupure d'une charge inductive à tension continue. Pour cela, les diodes sont montées en parallèle avec les consommateurs inductifs à courant continu de manière à être sollicitées par la tension d'alimentation dans le sens inverse. Après la coupure de la tension d'alimentation, l'auto-induction de la bobine fait en sorte que le courant continue dans un premier temps à circuler dans le sens initial. Sans diode de roue libre, cela entraîne une pointe de tension qui s'ajoute à la tension de service et peut endommager ou détruire la section de commutation. Avec une diode de roue libre, la pointe de tension est toutefois limitée à la tension de passage de la diode (environ 0,7 V pour le silicium). Cela protège très efficacement les composants électroniques, mais aussi les contacts de commutation contre les surtensions.
Le code à 3 ou 4 chiffres figurant sur le produit est le code LOT. Il s’agit d’un code de lot permettant d’attribuer clairement le produit à un lot de fabrication spécifique.
Le code LOT est imprimé directement sur le produit et sert à la traçabilité, au contrôle qualité ainsi qu’au support et aux demandes de service.
Selon le type de produit, le code LOT est imprimé à différents endroits :
- Pour les relais enfichables, le code LOT est imprimé sur la face supérieure.
- Pour les autres produits, le code LOT fait partie du marquage latéral ou est imprimé au dos.
- Pour les produits destinés au montage sur rail DIN, le code LOT se trouve généralement au dos.
L'actionneur manuel de nos relais enfichables est codé par couleur en fonction de la tension de la bobine. Ça permet de reconnaître facilement le type de tension correct et évite toute confusion.
| rouge | 230 V AC (50 Hz & 60 Hz) |
| rounge foncé | autres tensions AC |
| bleu | 24 V DC |
| blue foncé | autres tensions DC |
| gris | Convient aux tensions CA et CC (universal current "UC") |
| orange | push only Cet actionneur manuel ne peut pas être verrouillé, mais il va prendre le pas sur la bobine et actionner les contacts quand on appuie dessus. |
| noir | Bouton factice. Cet actionneur manuel peut être utilisé si le relais ne doit pas être actionné manuellement. L'actionneur normal peut être remplacé par ce bouton factice noir. Ça empêche toute action manuelle supplémentaire. |
Commencez par retirer l’actionneur manuel existant en le tirant vers le haut à l’aide d’un tournevis plat. Un tournevis plat de taille 0 ou 00 est recommandé. Une fois retiré, vous pouvez insérer le nouvel actionneur, par exemple un bouton factice ou un bouton push-only.

Les relais à semi-conducteurs (SSR) sont particulièrement intéressants lorsque des exigences particulières s'appliquent en matière d'environnement, de fréquence de commutation ou de qualité du signal :
- Résistance aux contraintes mécaniques : les SSR sont résistants aux vibrations et aux chocs.
- Cycles de commutation fréquents / commutation rapide : sans contacts mécaniques, les SSR sont idéaux pour les applications nécessitant de nombreuses opérations de commutation ou une fréquence de commutation élevée.
- Opérations de commutation rares : même avec une fréquence de commutation très faible, les SSR restent fiables car aucune corrosion des contacts ne peut se produire.
- Très longue durée de vie : sans pièces mobiles, les SSR ne s'usent pratiquement pas et ont une durée de vie beaucoup plus longue que les relais électromécaniques.
- Fonctionnement silencieux ou sans bruit : ils fonctionnent de manière totalement silencieuse et sans étincelles de contact.
- Commutation au passage par zéro en CA : De nombreux relais statiques commutent au passage par zéro de la tension alternative et réduisent ainsi les pics de tension, en particulier avec les charges inductives. Nos séries CSS-Z* et R10-Z1Z* sont équipées d'une commutation au passage par zéro.
Remarque : à des charges plus élevées, les relais statiques génèrent de la chaleur. Selon l'application, un refroidissement approprié ou un montage sur un dissipateur thermique est nécessaire.
Il existe deux manières d’ajouter des fonctions de temporisation à un relais industriel existant.
Les cube de temps sont idéaux lorsqu’un socle et un relais sont déjà installés et qu’une seule fonction de temps doit être ajoutée. Le cube se place simplement entre le socle et le relais, puis se règle à l’aide d’interrupteurs DIP ou d’un potentiomètre. Il est disponible pour les séries de relais industriels C2 et C3, ainsi que pour les séries Long Life C2x et C3x.
En alternative, il est possible d’utiliser des modules de temps. Ceux-ci s’insèrent dans le compartiment prévu à cet effet sur le socle et offrent, par rapport aux cubes temporisateurs, davantage de fonctions de temps et des plages de réglage plus étendues. Ils sont disponibles pour les socles S3-M0, S3-M0R, S3-M1, S3-M1R, S5-M et S5-MR, et sont compatibles avec les relais industriels C3 et C5, ainsi qu’avec les relais Long Life C3x.
Ces deux solutions permettent de configurer des relais temporisés avec jusqu’à trois contacts inverseurs – soit plus que les relais temporisés standards.
La procédure est la même pour presque tous les relais temporisés. Tout d'abord, sélectionnez une fonction à l'aide du potentiomètre. Chaque lettre (A, E, W, K, etc.) correspond à une fonction spécifique décrite sur le côté du relais ou sur la notice d'accompagnement.
Sélectionnez ensuite la plage de temps, la plage sélectionnée correspondant toujours à la valeur maximale. Le dernier potentiomètre permet ensuite de régler la durée avec précision. Si vous souhaitez par exemple régler un délai de coupure de 30 secondes, procédez comme suit :
Fonction : A
Plage de temps : 60 sec.
Réglage fin : sur une échelle de 0 à 6, le potentiomètre est alors réglé sur 3 (6 = 60 sec, 3 = 30 sec, 1 = 10 sec).
E – Retard à l'enclenchement
Cette fonction provoque un retard à l'enclenchement de la sortie.
Lorsque S s'enclenche, le temps t commence à s'écouler.
Une fois t écoulé, la sortie R s'enclenche.
Si S se désenclenche avant la fin de t, R reste désenclenchée.
A – Retard au déclenchement
Cette fonction provoque un retard au déclenchement de la sortie.
Lorsque S s'active, la sortie R s'active immédiatement.
Lorsque S se désactive, le temps t commence à s'écouler.
Une fois t écoulé, la sortie R se désactive.
F – Retard à l'enclenchement et au déclenchement
Cette fonction provoque une activation et une désactivation retardées de la sortie.
Lorsque S s'active, le délai d'activation t₁ commence.
Une fois t₁ écoulé, la sortie R s'active.
Lorsque S se désactive, le délai de désactivation t₂ commence.
Une fois t₂ écoulé, la sortie R se désactive.

W – Déclenchement à l'activation
Cette fonction fournit une impulsion de sortie fixe sur le front montant du déclencheur.
Lorsque S s'active, la sortie R s'active pendant la durée t.
Une fois t écoulé, R se désactive, indépendamment de S.
Lorsque S se désactive, R se désactive.
N – Balayage à la désactivation
Cette fonction fournit une impulsion de sortie fixe sur le front du déclencheur.
Lorsque S s'active, R ne change pas.
Lorsque S se désactive, la sortie R s'active pendant t.
Une fois t écoulé, R se désactive.
Q – Activation/désactivation
Cette fonction fournit des impulsions de sortie fixes à la fois sur le front montant et le front descendant du déclencheur.
Lorsque S s'active, la sortie R s'active pendant t1.
Une fois t1 écoulé, R se désactive.
Lorsque S se désactive, la sortie R s'active à nouveau pendant t2.
Une fois t2 écoulé, R se désactive.

K – Formation d'impulsions
Cette fonction fournit une impulsion de sortie fixe, indépendamment de la durée d'entrée.
Lorsque S s'active (impulsion ou fonctionnement continu), la sortie R s'active pendant t.
Pendant t, S n'a aucune influence sur R.
Une fois t écoulé, R se désactive.
L – Formation d'impulsions, redéclenchement
Cette fonction fournit une impulsion de sortie fixe qui redémarre lors du redéclenchement.
Lorsque S s'active, la sortie R s'active pendant t.
Si S se redéclenche pendant t, le temps t recommence à zéro.
Une fois le dernier t écoulé, R se désactive.
M – Formation d'impulsion
La fonction fournit une impulsion de sortie fixe après la désactivation de S.
Lorsque S est activé, R reste désactivé.
Lorsque S est désactivé, la sortie R s'active pendant t.
Une fois t écoulé, R se désactive.

B – Clignotant, démarrage par impulsion
Cette fonction assure une activation et une désactivation périodiques, commençant par une impulsion d'activation.
Lorsque S s'active, la sortie R s'active pendant la durée t, puis se désactive pendant la durée t.
R s'active et se désactive périodiquement jusqu'à ce que S se désactive. R se désactive avec S.
B1 – Clignotant, démarrage par impulsion, front descendant
Cette fonction assure une activation et une désactivation périodiques, commençant par une impulsion d'activation et se terminant par une impulsion de retard.
La sortie R s'active pendant la durée t, puis se désactive pendant la durée t.
R s'active et se désactive périodiquement jusqu'à ce que S se désactive.
Lorsque S se désactive, la sortie R s'active une nouvelle fois pendant t, puis R se désactive.
B2 – Clignotant, démarrage par intervalle
Cette fonction assure une activation et une désactivation périodiques, commençant par un intervalle de désactivation.
Lorsque S s'active, la sortie R reste désactivée pendant la durée t, puis R s'active pendant la durée t.
R s'active et se désactive périodiquement jusqu'à ce que S se désactive. R se désactive avec S.

G – Retard à l'enclenchement, impulsion unique
La fonction délivre une impulsion de sortie après un certain retard.
Lorsque S s'enclenche, le retard t₁ commence.
Une fois t₁ écoulé, la sortie R s'enclenche pour t₂.
Une fois t₂ écoulé, R se désenclenche.
Pendant t₂, S n'a aucune influence sur R.
H – Temporisation à l'enclenchement, impulsion unique
Lorsque S s'enclenche, la temporisation t₁ commence.
Une fois t₁ écoulé, la sortie R s'enclenche pendant t₂.
Une fois t₂ écoulé, R se désenclenche.
Lorsque S se désenclenche, R se désenclenche.

I – Commande d'impulsion, démarrage par impulsion
Cette fonction assure une activation et une désactivation périodiques, en commençant par une impulsion d'activation.
Lorsque S s'active, la sortie R s'active pendant t₁.
Une fois t₁ écoulé, R se désactive pendant t₂.
Ensuite, R s'active et se désactive périodiquement selon t₁ et t₂.
Lorsque S s'éteint, R s'éteint.
P – Horloge, démarrage par intervalle
Cette fonction assure une activation et une désactivation périodiques, en commençant par un intervalle de désactivation.
Lorsque S s'active, le délai t₁ commence et R reste désactivé pendant t₁.
Une fois t₁ écoulé, la sortie R s'active pendant t₂.
Ensuite, R s'active et se désactive périodiquement selon t₁ et t₂.
Lorsque S se désactive, R se désactive.

Y – Relais temporisé étoile-triangle
Cette fonction permet la commutation automatique du mode étoile au mode triangle.
Lorsque S est activé, le temps t commence à s'écouler et la sortie étoile R est activée.
Une fois t écoulé, la sortie étoile est désactivée et la sortie triangle est activée.
Lorsque S est désactivé, les deux sorties sont désactivées.
S – Commutation pas à pas
Cette fonction permet une commutation pas à pas à chaque activation du déclencheur.
À chaque commutation de S, la sortie R change d'état pendant la durée t.
Le déclencheur n'a aucune influence dépendante du temps.
LS – Commutation pas à pas (minuterie d'escalier)
Cette fonction permet une activation temporisée avec commande d'arrêt et de réinitialisation en option.
Lorsque S est déclenché, le temps t commence à s'écouler et la sortie R s'active.
Lorsque S est à nouveau déclenché, le temps t s'arrête et R se désactive.
Lorsque S est à nouveau déclenché, le temps t est réinitialisé et recommence immédiatement depuis le début.
Une fois t écoulé, la sortie R se désactive.

U – Surveillance de la séquence d'impulsions
Cette fonction surveille l'intervalle entre les impulsions et déclenche une alarme lorsque les impulsions sont trop rapprochées. Si l'intervalle est inférieur au temps réglé tP, une sortie d'alarme est activée après un délai supplémentaire tV.
La surveillance commence avec S1 ou S2.
Si l'intervalle entre les impulsions de P est inférieur à tP, une sortie d'alarme est activée après le délai d'alarme tV.
Si l'intervalle entre les impulsions est supérieur à tP, aucune alarme n'est déclenchée.
Le comportement au démarrage dépend de l'entrée sélectionnée S1 (la surveillance commence immédiatement avec la première impulsion. La surveillance des alarmes n'est pas supprimée pendant le démarrage.) ou S2 (la surveillance commence après le temps d'arrêt tA afin d'éviter les fausses alarmes pendant le démarrage du système).
V – Surveillance de la séquence d'impulsions
Cette fonction surveille l'intervalle entre les impulsions et déclenche une alarme si les impulsions sont trop espacées.
La surveillance commence avec S1 ou S2.
Si l'intervalle entre les impulsions P est supérieur à tP, une sortie d'alarme est activée après le délai d'alarme tV.
Si l'intervalle entre les impulsions est inférieur à tP, aucune alarme n'est déclenchée.
Le comportement au démarrage dépend de l'entrée sélectionnée S1 (la surveillance commence immédiatement avec la première impulsion) ou S2 (la surveillance commence après le temps d'arrêt tA).

Comment empêcher un réenclenchement pendant un temps défini après l’arrêt ?
Une interdiction de réenclenchement garantit qu’une charge ne peut pas être remise sous tension pendant une durée définie après l’arrêt, même si de nouvelles impulsions sont présentes. Les applications typiques sont la protection des appareils, la limitation de la fréquence de commutation ou l’imposition de temps d’arrêt minimaux. Cette fonction peut être réalisée simplement à l’aide de deux relais temporisés, sans fonctions spéciales.
Exemple avec 2× CIM1/UC24–240 V
Exigence
- Une impulsion met la charge sous tension.
- La charge doit rester enclenchée pendant 15 min.
- Ensuite, l’entrée doit être bloquée pendant 2 h.
Réglage des relais temporisés
Relais 1 (R1) : CIM1/UC24–240 V
Fonction : Temporisation à la retombée (A)
Temps : 15 min
Relais 2 (R2) : CIM1/UC24–240 V
Fonction : Impulsion à la coupure (N)
Temps : 2 h
Fonctionnement
Lorsque le relais temporisé R1 reçoit une impulsion sur l’entrée B1, son contact 15/18 se ferme et la temporisation à la retombée (A) démarre.
La charge est enclenchée et reste active pendant 15 min.
En parallèle, un signal permanent est appliqué à l’entrée B1 du second relais temporisé R2 via le contact fermé de R1.
Au terme des 15 min, le contact 15/18 de R1 s’ouvre à nouveau.
Cette transition descendante déclenche la fonction impulsion à la coupure (N) du relais R2.
Le contact à ouverture de R2 coupe alors l’alimentation de R1 pendant 2 h.
Durant cette période, R1 est bloqué et ne peut pas commuter.
Les impulsions entrantes sont sans effet.
Après les 2 h, le contact de R2 se referme.
R1 est à nouveau autorisé et le système est prêt pour le cycle suivant.


Un relais à rémanence (en anglais latching relay) est un relais bistable qui conserve son état de commutation même lorsque la tension d’alimentation est interrompue. Cela signifie que la dernière position sélectionnée — qu’elle soit activée ou désactivée — reste stockée de manière fiable jusqu’à ce que le relais soit volontairement basculé.
Il est utilisé partout où l’état de commutation doit être maintenu après une coupure de courant ou une interruption. Ainsi, les installations ou systèmes peuvent continuer à fonctionner de manière sûre et stable sans devoir réinitialiser l’état.
Les principaux avantages sont la haute efficacité énergétique et la sécurité de fonctionnement. L’énergie n’est requise que lors du basculement, mais pas pour maintenir l’état. En même temps, la capacité à conserver l’état de commutation même en cas de perte de tension assure une fiabilité supplémentaire et une protection contre des changements indésirables dans l’exploitation.
Un relais à rémanence fonctionne grâce à la rémanence magnétique : lorsqu’il est commuté, un magnétisme résiduel subsiste dans le noyau magnétique et maintient l’ancre dans sa position, même si la tension d’alimentation est coupée. Ainsi, l’état de commutation reste stablement mémorisé jusqu’à ce qu’un nouveau signal de commande génère un champ magnétique opposé qui compense le magnétisme résiduel existant. Ce n’est qu’alors que le relais est commuté volontairement dans un nouvel état. De cette manière, il ne consomme de l’énergie que pendant le processus de commutation et allie haute efficacité et sécurité de fonctionnement.
Pour les relais à rémanence avec bobines CC, les deux entrées de commande peuvent être alimentées simultanément. Dans ce cas, l’entrée A1 (ON) a toujours la priorité sur l’entrée A3 (OFF).
C’est différent avec les bobines CA : si les deux entrées sont alimentées en même temps, cela entraîne une commutation incontrôlée des contacts. Le relais est alors détruit en très peu de temps. Pour cette raison, il ne faut jamais activer simultanément les deux entrées de commande sur un relais à rémanence avec bobine CA.
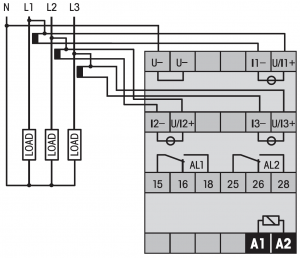
Tension, courant, fréquence, puissance active, puissance apparente, cos Phi, Delta Phi (ordre des phases).
La fiche technique de l'appareil et la notice d'utilisation contiennent une description du menu, etc.
Appuyez simultanément sur les deux touches fléchées pour accéder au menu. Lorsque vous accédez aux paramètres, vous êtes automatiquement guidé à travers le menu.
Pour pouvoir mesurer des courants supérieurs à 5 A, il faut utiliser des transformateurs de courant dont le côté secondaire est spécifié pour 5 A. Cela permet de mesurer également des courants élevés, mais il faut alors adapter le « facteur d'échelle » dans les paramètres.
Cela peut être dû à une petite tension résiduelle dans le circuit, suffisante pour que la bobine du relais ne retombe pas. Il suffit de 0,1*Un pour qu'elle reste dans l'état excité ! Avec une bobine de 230 VCA, le relais ne retomberait donc qu'à <23 VCA !
Les fils/torons longs génèrent souvent une tension d'induction qui empêche le relais de se désactiver. ComatReleco a développé un dispositif antiparasite, le CEM01, pour remédier à ce problème. Ce dispositif antiparasite est connecté en parallèle à la bobine et compense le courant résiduel des fils. Le relais peut ainsi se désactiver correctement.
Si un relais ou un contacteur entre en contact avec de l'eau douce ou sale, son bon fonctionnement n'est plus garanti. Une corrosion des contacts et des conducteurs peut se produire, en particulier en combinaison avec de la saleté ou des sels. Même si le composant semble fonctionner à nouveau après séchage, il existe toujours un risque de dommages cachés.
Un relais affecté par l'humidité peut tomber en panne de manière imprévisible, rester bloqué dans une position de commutation ou transmettre des signaux erronés. Il existe également un risque de courts-circuits internes ou d'arcs électriques, en particulier dans les applications à courant élevé. De telles défaillances compromettent non seulement la sécurité de fonctionnement, mais peuvent également entraîner des dommages consécutifs considérables.
C'est pourquoi il est toujours préférable et plus sûr de remplacer un relais ou un contacteur affecté. Le coût d'un nouvel appareil est relativement faible, tandis que les coûts potentiels liés aux défaillances ou aux dommages consécutifs peuvent dépasser de plusieurs fois le coût d'acquisition. C'est le seul moyen de garantir à long terme la qualité et la fiabilité habituelles.